




Calibrating RGB Sensors for Accurate Color Classification in Conveyor Systems
 View
View
Color-based sorting systems rely heavily on accurate sensor calibration. In the mini conveyor sorting project, the TCS34725 RGB sensor was used to detect object color before classification. However, raw RGB readings are highly sensitive to lighting conditions, surface reflectivity, and object distance.
Without proper calibration, misclassification becomes frequent, especially under varying ambient light.
Understanding Raw RGB Output
The TCS34725 sensor provides:
- Red (R)
- Green (G)
- Blue (B)
- Clear (C)
Raw values alone are not sufficient for direct classification. Different materials reflect light differently, and ambient lighting significantly influences readings.
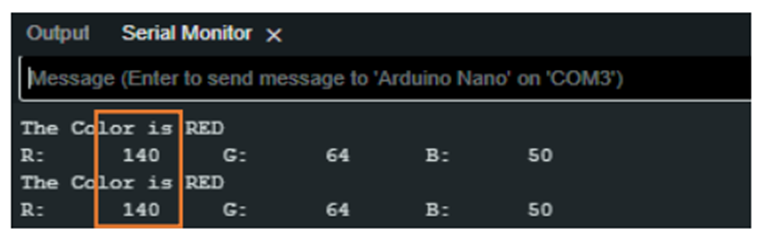
During early testing, identical objects produced inconsistent values under different room lighting conditions.
Calibration Procedure
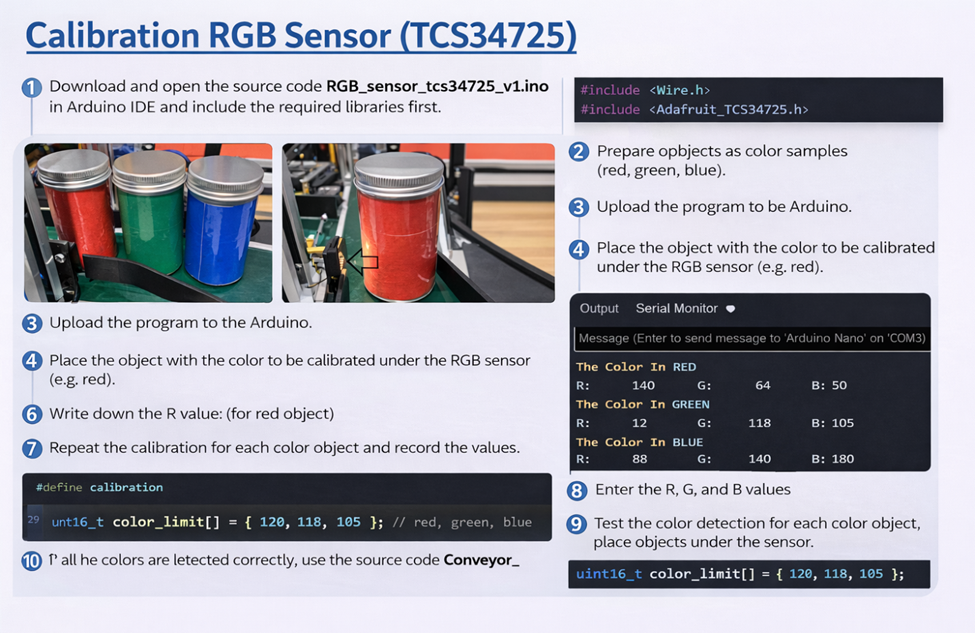
Calibration was performed in a controlled setup:
- Conveyor stopped to stabilize object position
- Each reference object (Red, Green, Blue) placed under sensor
- Multiple samples collected
- Average RGB values recorded
- Threshold ranges defined
Instead of fixed exact values, upper and lower tolerance boundaries were created.
Example threshold approach:
- RED if: R > G and R > B and R > 120
- GREEN if: G dominant and G > threshold
- BLUE if: B dominant and B > threshold
Using dominance logic reduces dependency on absolute values.
Ambient Light Compensation
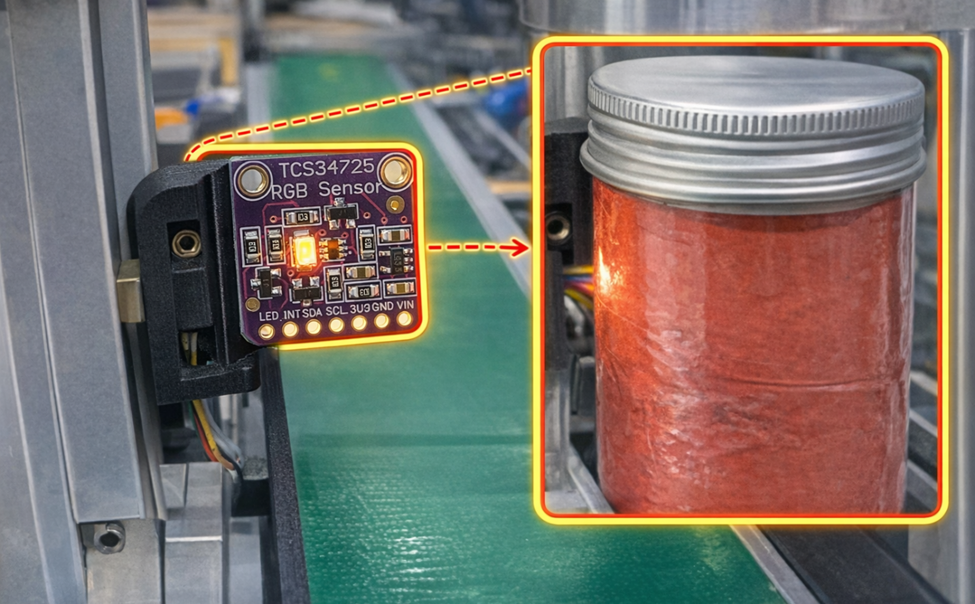
To reduce lighting influence:
- Sensor mounted at fixed distance
- Shielded from external light using enclosure
- Calibration performed under operational lighting conditions
- Clear channel value monitored to normalize RGB
Optional normalization technique:
R_norm = R / C
G_norm = G / C
B_norm = B / C
This improves consistency across lighting variations.
Filtering and Stability
Noise and vibration caused value fluctuation while objects were moving.
To improve stability:
- Multiple readings averaged
- Short delay before classification
- Conveyor speed limited during detection zone
Filtering prevents rapid state switching between color categories.
Integration with Sorting Logic
After calibration, RGB classification feeds into:
- Servo selection
- Object counter increment
- LabVIEW display update
Only when stable classification persists for defined delay does sorting trigger.
This avoids mis-sorting due to transient noise.
Engineering Insight
Proper calibration transforms a simple RGB sensor into a reliable classification tool. Instead of relying on fixed values, combining dominance logic, threshold ranges, normalization, and filtering significantly improves sorting accuracy.
In automation systems, sensor calibration is not optional it is essential for consistent performance.
#RGBSensor##TCS34725##ColorDetection##SensorCalibration##EmbeddedSystem##AutomationSystem##ConveyorSystem##Arduino##Mechatronics##IndustrialAutomation#
 #RGBSensor#
#TCS34725#
#ColorDetection#
#SensorCalibration#
#EmbeddedSystem#
#AutomationSystem#
#ConveyorSystem#
#Arduino#
#Mechatronics#
#IndustrialAutomation#
#RGBSensor#
#TCS34725#
#ColorDetection#
#SensorCalibration#
#EmbeddedSystem#
#AutomationSystem#
#ConveyorSystem#
#Arduino#
#Mechatronics#
#IndustrialAutomation#
Sign In Or Register Comment after
No comments yet. Be the first to comment!